计算全息 (Computer-generated Holography, CGH) 是一种通过计算机生成全息图并进行光学重建从而生成用户自定义波前的技术。通过准确的全息图实现高精度的波前调制,是计算全息研究领域中的一个关键问题。找到用于准确重建目标图像的全息图精确解,本质上是一个病态的逆问题。这类病态逆问题通常借助非凸优化算法转化为最优值求解问题,求解精度取决于约束、优化框架和初始化条件等因素。优化算法的介入,使计算全息在虚拟现实与增强现实、抬头显示、数据加密、激光加工和超表面设计等应用中能够进一步发挥关键性的作用。
剑桥大学初大平教授与清华大学曹良才教授团队总结了全息图优化的算法设计准则,归纳了计算全息现有的优化框架,同时也针对计算全息优化算法的最新应用进展发表见解。相关综述论文以“Non-convex Optimization for Inverse Problem Solving in Computer-generated Holography”为题发表在Light: Science & Applications。
▎正文
过去几十年,研究人员对计算全息图重建精度的要求日益提升,推动了计算全息优化算法的不断进步。如图1所示,全息图生成的基本问题可以描述为从给定的物光波前强度分布求解全息图,这是一个受物理和硬件条件约束的逆问题。
图1. 计算全息中的逆问题
在计算全息的逆问题中,严格满足所有约束并能够重建出人为定义强度分布的全息图不一定是真实存在的。然而在计算全息的物理模型中,重建波前与其强度之间的关系是病态的,这使计算全息能够通过非凸优化获得近似满足所有约束的多个全息图解,即局部最优解。非凸优化过程涉及的数学模型可由图2具象化表示。
图2:非凸优化求解逆问题
为确保非凸优化的准确运行以获得局部最优解,优化中需要考虑三个关键因素:约束、优化框架和初始化条件。
一、约束
约束是指对全息图非凸优化所施加的限制。如图3所示,它们由优化的物理模型和实际硬件条件决定,规定了优化算法寻找逆问题最优解的闭集。
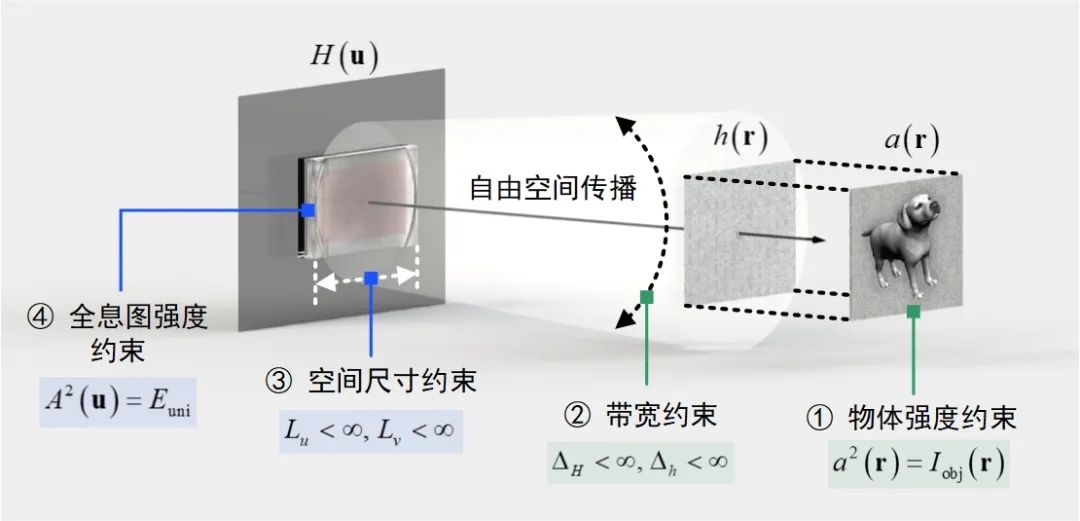
图3:全息图优化基本约束
· 约束①限制了重建波前的强度分布为物体强度分布。它作为非凸优化在物平面的约束条件,能够确保全息图如实地重建物光波前强度。
· 约束②描述了有限的传播带宽。硬件条件的限制决定了系统的带宽不是无限的,而具体的带宽限制与调制器件参数、传播距离、衍射算法类型等因素相关。
· 约束③表示全息图有限的空间尺度,在实际计算中通常通过在全息图平面补零来实现。
· 约束④则是相位型全息图独有的强度约束,它将全息图转变为纯相位分布。
二、优化框架
优化框架决定了逆问题最优解的搜索路径,通常会极大影响计算时间、计算所需存储空间和最终收敛点。计算全息中较为广泛应用的优化框架包交替投影法和梯度下降方法,其中梯度下降包括一阶梯度下降与二阶梯度下降。
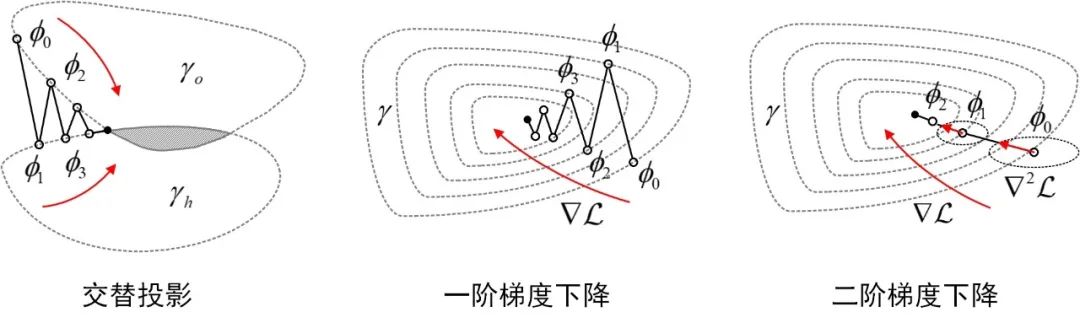
图4:常用的计算全息优化框架
· 交替投影法 (Alternating Projections) 通过在两个闭集合之间的交替投影找出能够满足两个闭集合约束的最优解。
1972年,G-S 迭代作为交替投影算法被提出用于解决相位恢复问题,如图5所示,它使用一对正逆傅里叶变换作为投影,从物平面与傅里叶平面上已知的强度分布中恢复相位。
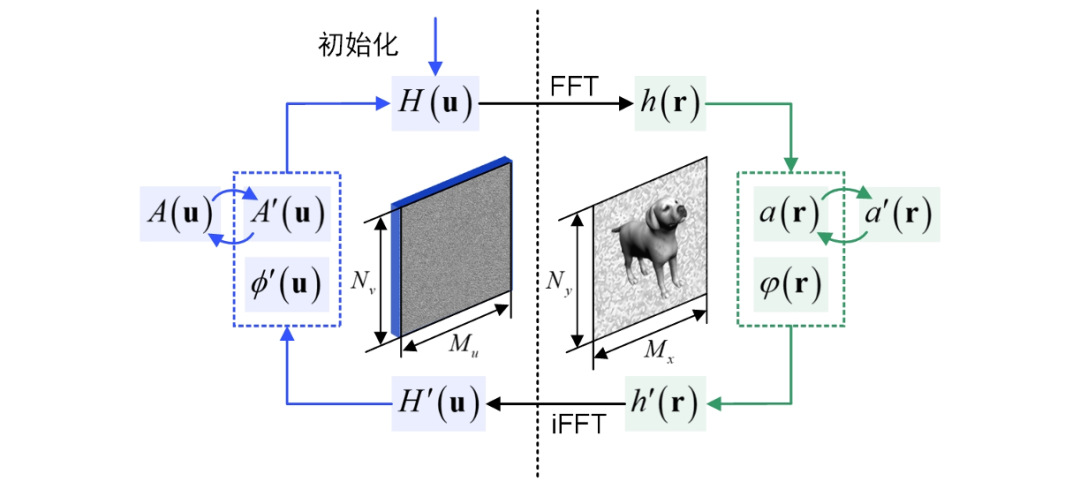
图5:交替投影:G-S算法
后来 Fienup 对这种方法进行了改进,如图6所示,通过在双平面上施加多种非负约束增强了交替投影的灵活性,并将其命名为误差下降算法 (Error Reduction Algorithm) 。
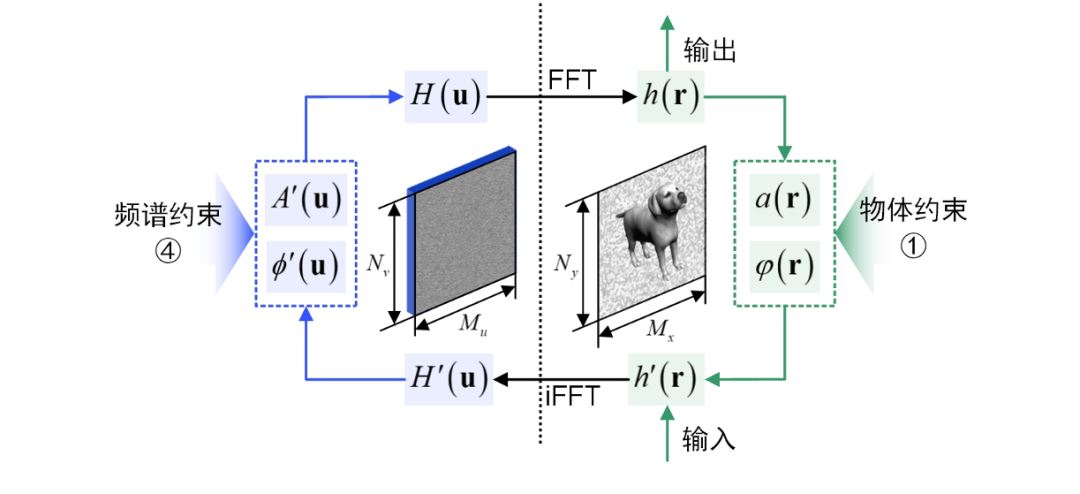
图6:交替投影:误差下降算法(Error Reduction Algorithm)
随后,将交替投影应用到计算全息中的相关研究也开始涌现。1988年,Wyrowski 和 Bryngdahl 提出了一种专门应用于计算全息的迭代傅里叶变换算法 (Iterative Fourier Transform Algorithm,IFTA) 。如图7所示,IFTA算法在计算中施加带宽约束和空间尺寸约束,并且基于物光波前的频谱与物体强度之间的自相关关系提出了物平面上的密集采样方法。
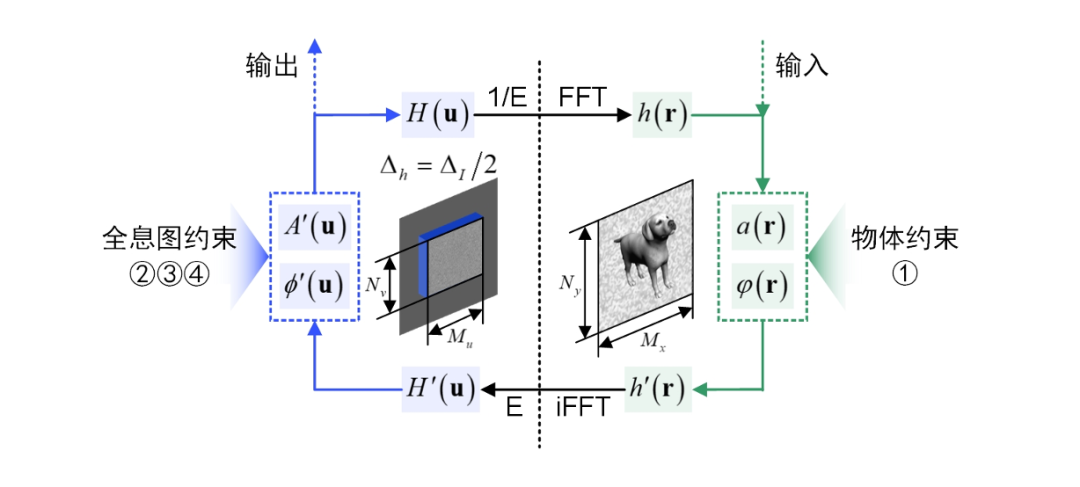
图7:交替投影:迭代傅里叶算法(IFTA)
· 一阶梯度下降通过梯度计算来判断损失函数下降的方向,从而寻找满足约束条件的最优解,如图8所示,具有代表性的算法为随机梯度下降法 (Stochastic Gradient Descent,SGD) 。
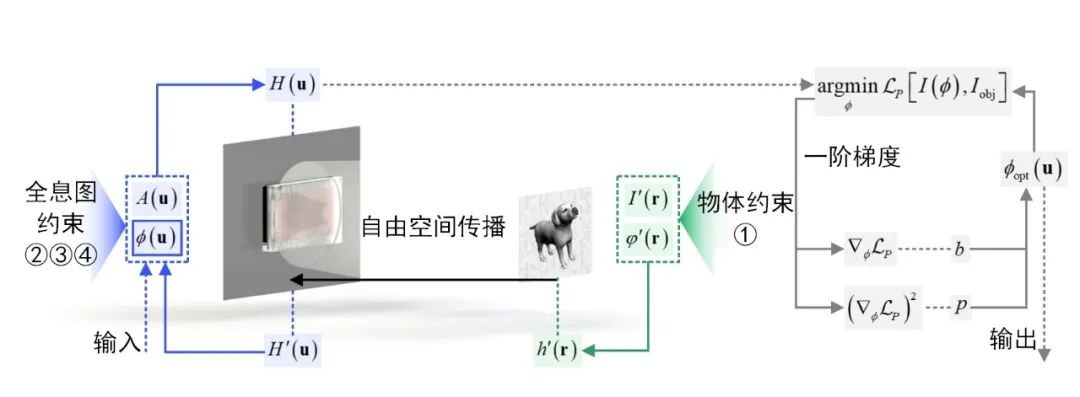
图8:一阶梯度下降:随机梯度下降(SGD)
· 二阶梯度下降在判断损失函数下降方向的基础上,通过二阶梯度运算进一步寻找损失函数下降最快的方向,从而搜索到更大范围内的最优解,如图9所示,代表性算法为拟牛顿法 (Quasi-Newton Method) 。
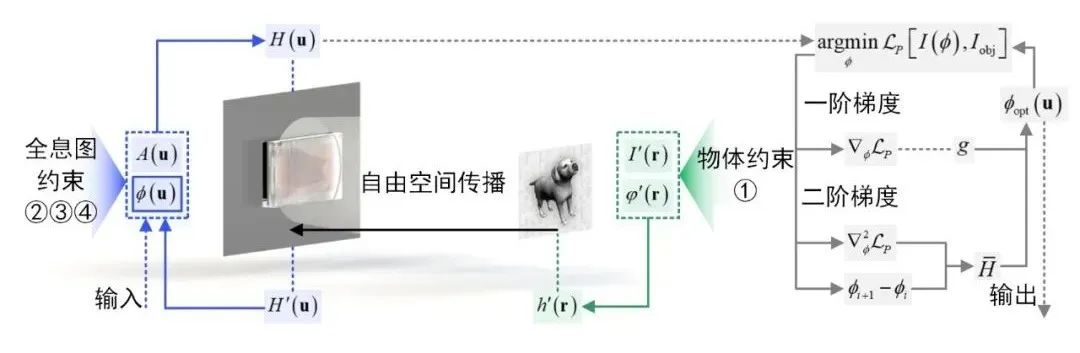
图9:二阶梯度下降:拟牛顿法
三、初始化条件
初始化条件在计算全息的非凸优化场景中通常指物光波前相位的初始化定义。由于物光波相位是全息图优化中唯一的浮动参数,不同的初始化物光相位对最终收敛点有极大的影响。
· 随机相位的使用默认了物光波前所记录的物体具有散射表面,由于现实世界中的大多数材料在波长的尺度上是粗糙的,粗糙散射表面的各个微观面为入射光贡献了随机分布的相位。如图10所示,随机相位物光波前能够重建出类似散射体的离焦效果。这种与真实世界类似聚焦与离焦效果是全息显示纵深感的重要来源。但由于计算全息通常使用相干光照明,随机相位也为重建带来了散斑噪声。
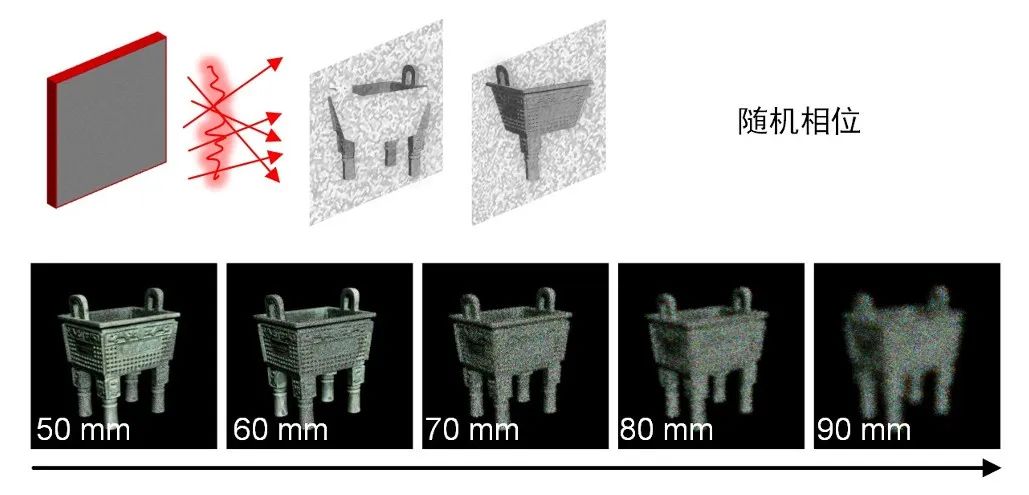
图10:随机相位初始化的三维重建
· 均匀相位的物光波前带宽较小且不发生散射,能够实现高度逼真的无散斑重建。均匀相位从物理上描述了自然界中极度光滑表面给物光波前带来的相位分布,例如镜面物体表面,这样的物体表面即使在被相干光照射的情况下也极少产生散斑。如图11所示,重建波前在离焦位置重建出的是轮廓外扩的衍射图案而不是模糊效果,因此重建波前会失去作为散射前波的传播特性,并且无法在三维空间中带来物体的纵深感。
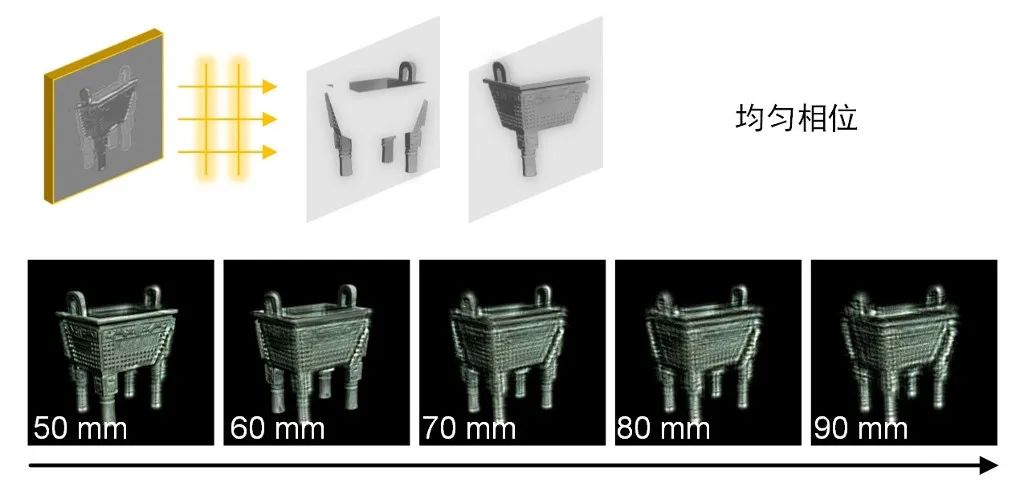
图11:均匀相位初始化的三维重建
· 会聚的二次相位也常在正向模型中被用作物光波的初始相位。在二次相位的全息图重建中,随着传播距离的增加,重建强度图案的空间尺寸也随之放大。如图12所示,由于这种缩放特性的存在,二次相位使重建波前无法如实地反馈三维物体的真实大小关系,无法在三维空间中保持其整体尺寸特征。因此,二次相位的全息图大多被应用于二维的全息投影。
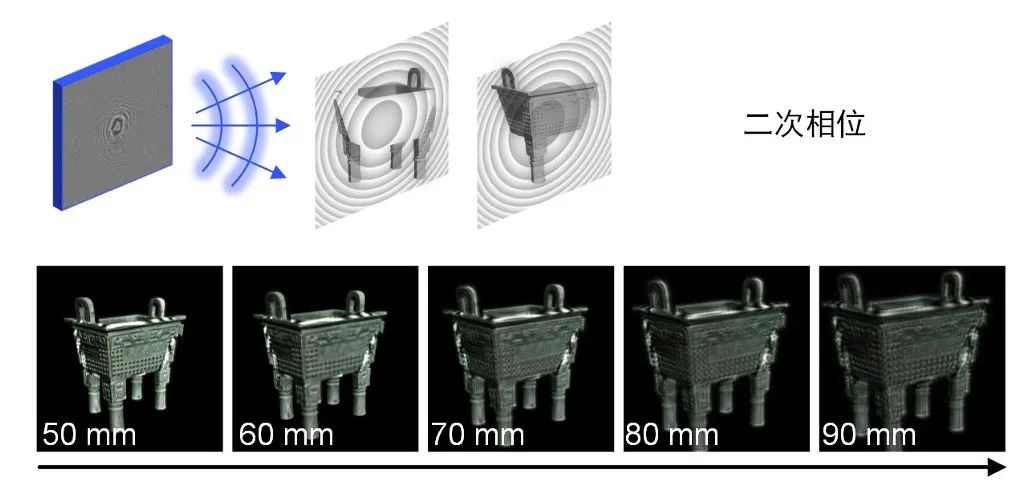
图12:二次相位初始化的三维重建
▎总结
非凸优化方法的介入不仅为计算全息中的核心难点问题提供了适当的处理方法,也为计算全息图的更广泛应用提供了基础。论文提供了基于交替投影算法、随机梯度下降法与拟牛顿法的全息图优化开源代码,能够实现多种功能性的二维与三维全息图计算。
开源代码链接:
https://github.com/THUHoloLab/Optimization_algorithms_for_CGH
▎论文信息
Sui, X., He, Z., Chu, D. et al. Non-convex optimization for inverse problem solving in computer-generated holography. Light Sci Appl 13, 158 (2024).
https://doi.org/10.1038/s41377-024-01446-w
